
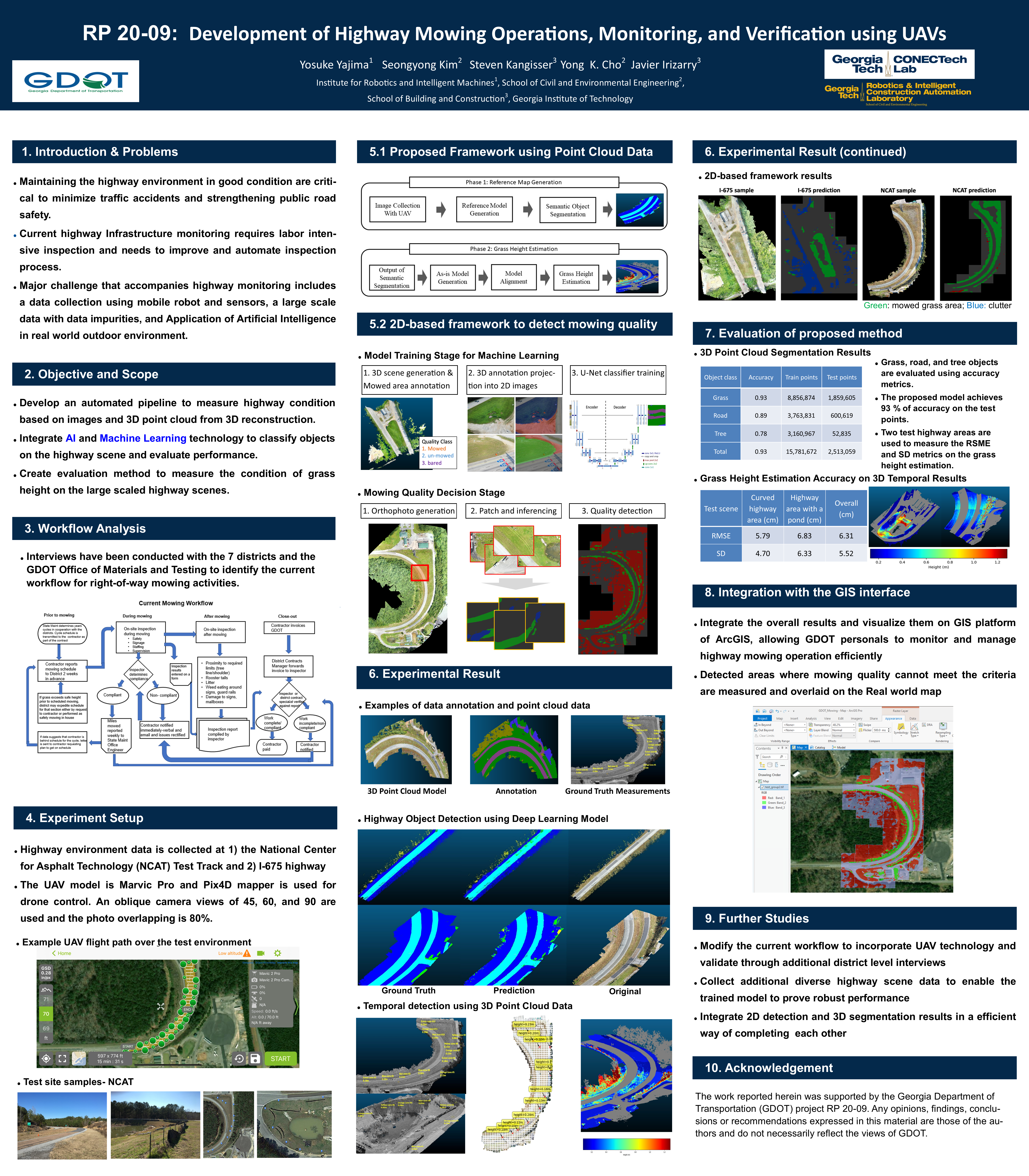
DEVELOPMENT OF HIGHWAY MOWING OPERATIONS, MONITORING, AND VERIFICATION USING UAVS
PI: Javier Irizarry
Co-PI(s): Yong Kwon Cho
Institution(s): Georgia Institute of Technology
Abstract
Vegetation control and roadside mowing on highway is a repetitive task conducted several times per year. Especially, verification of mowing work is labor-intensive, time-consuming and presents safety issues. This study focuses on a development of UAV-based automatic mowing inspection framework using computer vision and Artificial Intelligence. This work also presents a workflow analysis to optimize for the right-of-way mowing activities. The goal of this project is to develop an automated performance verification framework for highway grass condition monitoring tasks. The proposed method uses real highway image data captured by the UAV to process the grass classification and height estimation algorithms. The results from the proposed approaches are evaluated in terms of accuracy of detected grass regions and heights by comparing ground truth data. The outcome of this research will enhance and automate the roadway mowing inspection and monitoring process.
Please comment below with any statements or questions you may have. Also let GTI if you would be interested webinars or presentations on similar topics.