![]()

































Poster 22-19
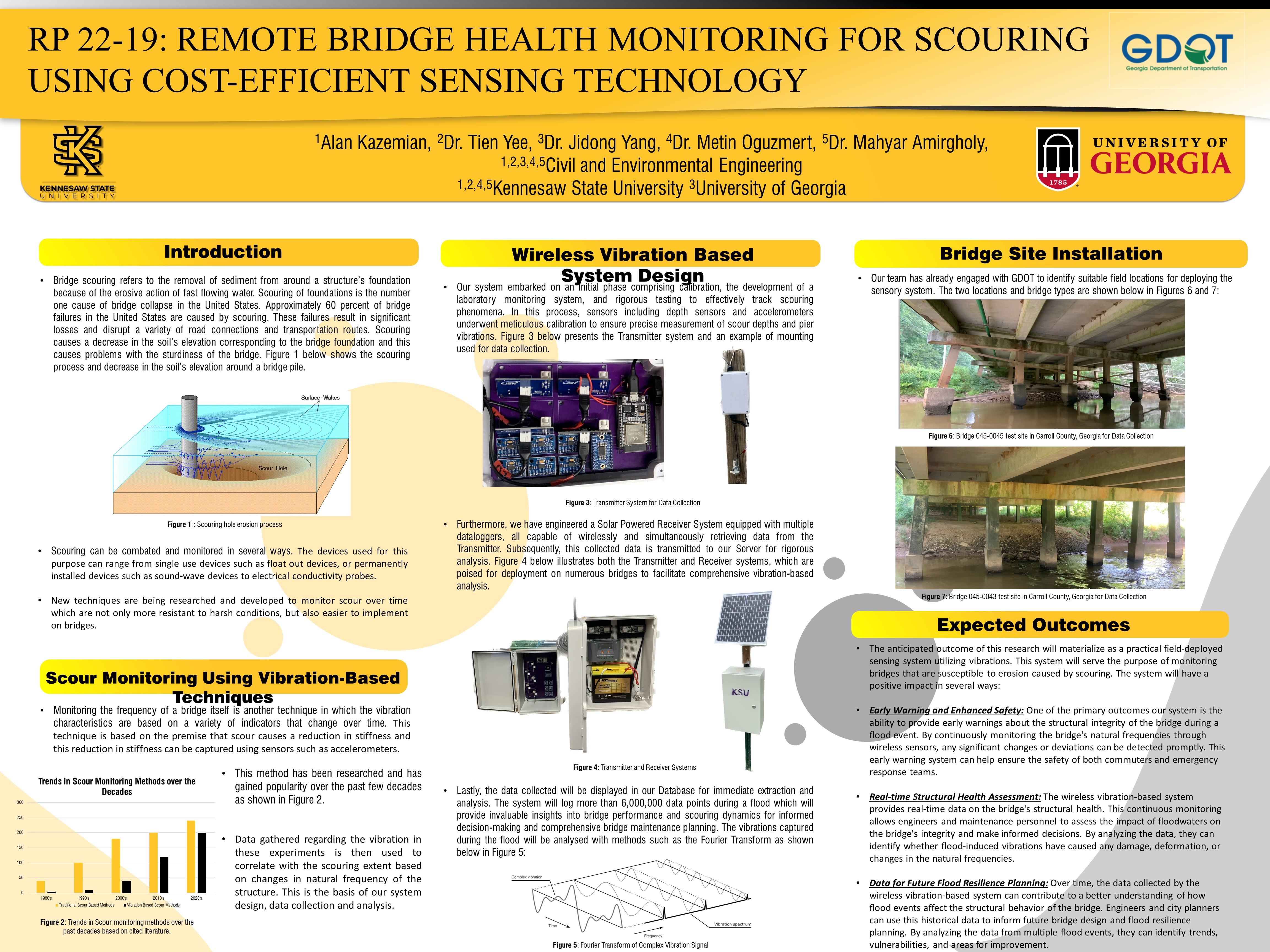
Remote Bridge Health Monitoring for Scouring Using Cost-Efficient Sensing Technology
PI: Tien Yee
Co-PI(s): Jidong Yang, Metin Oguzmert, and Mahyar Amirgholy
Institution(s): Kennesaw State University & University of Georgia
Abstract
Scouring is a major concern for highway bridges and is known to be a common cause of road bridge failures in the United States. Bridges are often inspected for scouring periodically and after large storm events to determine the health and safe operation of bridges. The general practice of manual measurements is employed by GDOT personnel after the storm events to determine the extent of scouring on bridge piers. While manual measurements are good for assessment after storm events, however, there are two disadvantages to this practice. Firstly, manual measurements require that the GDOT inspection crew be on standby for deployment immediately after a storm event and depending on the number of personnel that is available, may not be able to quickly perform the inspection on the majority of the bridges. Secondly, without prior knowledge of the extent of scour depths during floods, the post-flood inspection may be a safety concern for GDOT engineers and inspection crews. Commercial instrumentations are often expensive and may not be easily customizable to fit the needs of GDOT. There is a need for a less expensive and safe alternative near real-time bridge health assessment due to scouring. The goal of this project is to firstly produce a cost-efficient system for remote bridge health monitoring using existing technology and secondly make use of the data collected from the system to optimize operations within GDOT bridge monitoring units. Currently, the research has produced a lab-tested system shown in the poster. This system is poised to be deployed in the field for data collection.
Please comment below with any statements or questions you may have. Also let GTI if you would be interested webinars or presentations on similar topics.
Theme by Danetsoft and Danang Probo Sayekti inspired by Maksimer